About
I am a PhD Researcher at TU Delft, focusing on Safe Planning and Control for Autonomous Robots. My research investigates what safety truly entails for autonomous robotic systems, how we can quantify and benchmark safety, and how to develop adaptive, real-time safety formulations that ensure reliable robot behavior in dynamic environments.
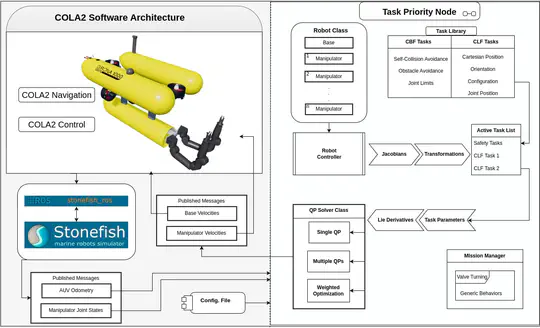
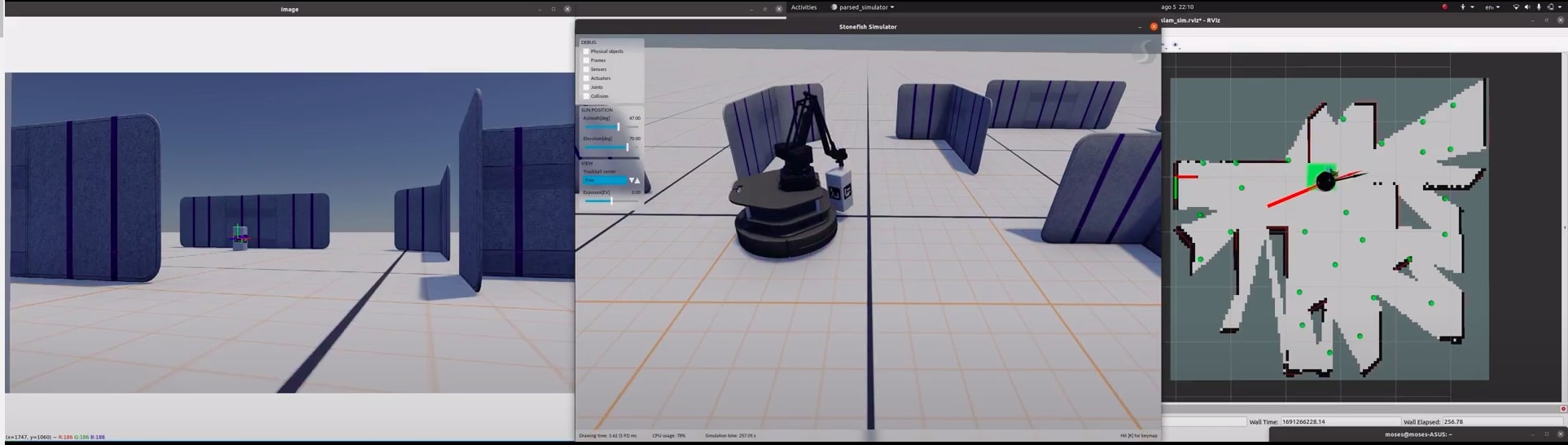
Before my PhD, I earned an Erasmus Mundus Joint Master’s Degree in Intelligent Field Robotic Systems (IFRoS), where I explored the four pillars of robotics—localization, perception, planning, and manipulation—and developed solutions for mobile robots, multi-robot systems, aerial robots, and autonomous underwater vehicles (AUVs). I conducted my thesis at the Girona Underwater Vision and Robotics Lab (CIRS), working on an optimization-based whole-body kinematic control framework for intervention autonomous underwater vehicles (I-AUVs). My work focused on finely integrating stability and safety guarantees into the control architecture.
- Robotics
- Computer Vision
- Machine/Deep Learning
PhD in Robotics, 2024 - present
Delft University of Technology
Joint MSc in Intelligent Field Robotic Systems, 2024
Universitat de Girona | University of Zagreb
MSc in Mechatronics Engineering (Not Completed), 2022
Sabancı University
BSc in Mechanical Engineering, 2021
Çukurova University
Technical Skills
Experience
- Conducting research on ”Safe Planning and Control for Autonomous Robots,” at the Department of Cognitive Robotics.
- Explored deep learning architectures such as SNNs, Recurrent ViTs, and Asynchronous CNNs, that leverage the asynchronous nature of event data from event-based vision sensors for object detection using PyTorch.
- Curated underwater object-detection and optical flow datasets with a remotely operated Underwater Vehicle fitted with a DAVIS camera at the Institute for Underwater Robotics research lab.
- Developed a modular event data preprocessing and visualization pipeline for the underwater perception group in Python.
- Experimentally tested and validated optimization-based techniques for annotating underwater object detection datasets.
- Taught Differential Equations (MATH 202) and Introduction to Probability (MATH 203) recitation classes to undergraduate students over the course of two semesters.
- Provided grading and proctoring support to faculty members.
Projects

Gallery








Contact
Feel free to leave me a message.
- m.c.ebere@tudelft.nl
- +34 645 287 887
- Building 34, Mekelweg 2, Delft, 2628 CD
- 34.F-1-560