Moses Ebere
Moses Ebere
Home
Projects
Contact
Light
Dark
Automatic
Projects
Autonomous Valve Turning with an Optimization-based Whole-body Kinematic Control Algorithm
Optimization-based Kinematic Control
Moses Chuka Ebere
Demo Videos
Multi-Modal Human-Swarm Interaction Using Vision, Speech & Multi-Agent LLMs
Leveraging Multi-Agent LLMs in Human-Swarm Interaction
Moses Chuka Ebere
,
Joseph Oloruntoba Adeola
Demo Videos
Slides
Report
Robust Coordination and Control of Multi-Robot Systems Using Consensus Protocols
Multi-Robot Systems Project
Moses Chuka Ebere
,
Joseph Oloruntoba Adeola
,
Khawaja Ghulam Alamdar
,
Nada Elsayed Abbas
Code
Demo Videos
Slides
Report
Stereo Visual Odometry on the KITTI Dataset
Visual Odometry Project
Moses Chuka Ebere
,
Joseph Oloruntoba Adeola
Code
ROS Package for Spawning Multiple Robots in Gazebo
Multi-robots ROS Package
Moses Chuka Ebere
,
Joseph Oloruntoba Adeola
Code
Controlling a Swarm of Omnidirectional Robots in a Simulator Using Reynolds’ Rules
Multi-Robot Systems Project
Moses Chuka Ebere
,
Joseph Oloruntoba Adeola
,
Khawaja Ghulam Alamdar
,
Nada Elsayed Abbas
Code
Demo Videos
Slides
Report
Autonomous Exploration, Localization, Mapping, Perception, and Manipulation
Autonomous Robot Project
Moses Ebere
,
Joseph Adeola
,
Preeti Verma
Simulation Implementation
Real Robot Implementation
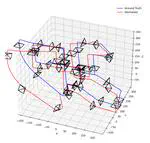
Pose-based EKF SLAM using ICP for Scan Registration
SLAM Project
Moses Ebere
,
Joseph Adeola
,
Preeti Verma
Code
Video
Slides
Report
Event-Based Feature Tracking Using the Iterative Closest Point Algorithm (for a DAVIS event camera)
Feature Tracking with Events
Moses Ebere
,
Joseph Adeola
,
Preeti Verma
Event Tracker Video
GroundTruth Video
Slides
Report
Task-Priority Redundancy Resolution Algorithm for a Mobile-base Manipulator Robot
Robot Manipulation/Intervention Project
Move-to-point
Pick-and-place
Pick-transport-and-place
Pick-transport-and-place with Visual Feedback
Slides
Report
»
Cite
×