Design and Simulation of a Closed-Loop Controller for Balancing a Robot Butler (with a compliant element) in the Face of Impulse Disturbance
 Control System in Simulink
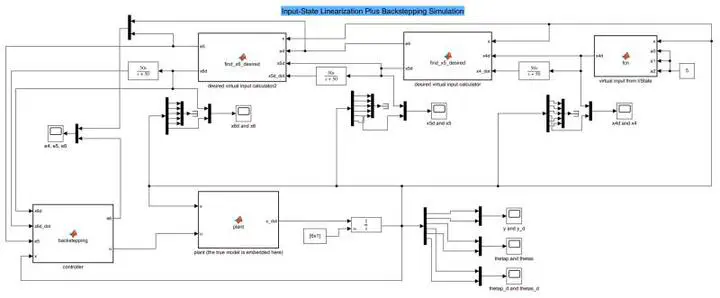
Control System in SimulinkIn this project, I developed a control system for a Robot Butler, successfully addressing the challenges posed by impulse disturbances and ensuring robust balance with the incorporation of a compliant element. The proposed solution finely combines Input-State Linearization and Backstepping methodologies to formulate a highly effective control law for the robot.
The project culminated in the creation of a comprehensive report, showcasing the theoretical foundation, simulation results, and insights gained from the closed-loop system’s performance in the MATLAB/Simulink environment. This endeavor demonstrated my strong analytical and problem-solving skills, as well as my ability to apply advanced control strategies to real-world scenarios.