Robust Coordination and Control of Multi-Robot Systems Using Consensus Protocols
 Swarm Robotics
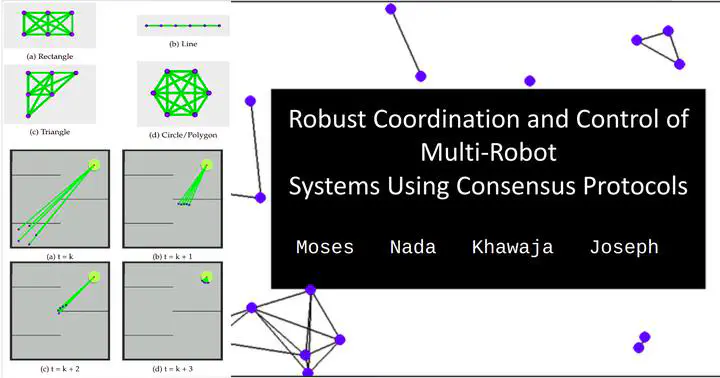
Swarm RoboticsProject Summary: This pioneering project by a dedicated team of four master’s students, including myself, delves into the development and implementation of consensus protocol-based strategies for the robust coordination and control of multi-robot systems. Focusing on rendezvous and formation control, we crafted a software framework utilizing graph theory for dynamic robot swarm control. Our methodology, tested in dual-simulation environments, demonstrates the protocols’ efficacy in achieving precise formation control and obstacle avoidance, underscoring the potential of consensus protocols in enhancing distributed robotic systems.
Innovations and Contributions:
- Developed and implemented advanced consensus protocols for multi-robot coordination, emphasizing rendezvous and formation control.
- Utilized graph theory for intricate network modeling, enabling structured swarm control in both distributed and semi-distributed settings.
- Conducted comprehensive simulations in Pygame and ROS-integrated Stage Simulator, validating the effectiveness of our protocols across diverse scenarios.
- Contributed to the field with video demonstrations and extensive experimental analysis, illustrating practical applications and the protocols’ adaptability in real-world scenarios.
Impact and Future Work: Our research significantly advances the understanding and application of consensus protocols in swarm robotics, with potential implications for autonomous exploration, synchronized tasks, and efficient spatial organization. The project sets a foundation for future exploration into hardware implementations and real-world applications, promising substantial contributions to robotics and distributed control systems.
Personal Contribution: My contributions spanned from conceptualization to implementation, including algorithm development, simulation testing, and analytical evaluation. This project not only honed my skills in robotics and software development but also highlighted my ability to collaborate effectively and drive innovation in complex multi-robot systems.